配線と設定
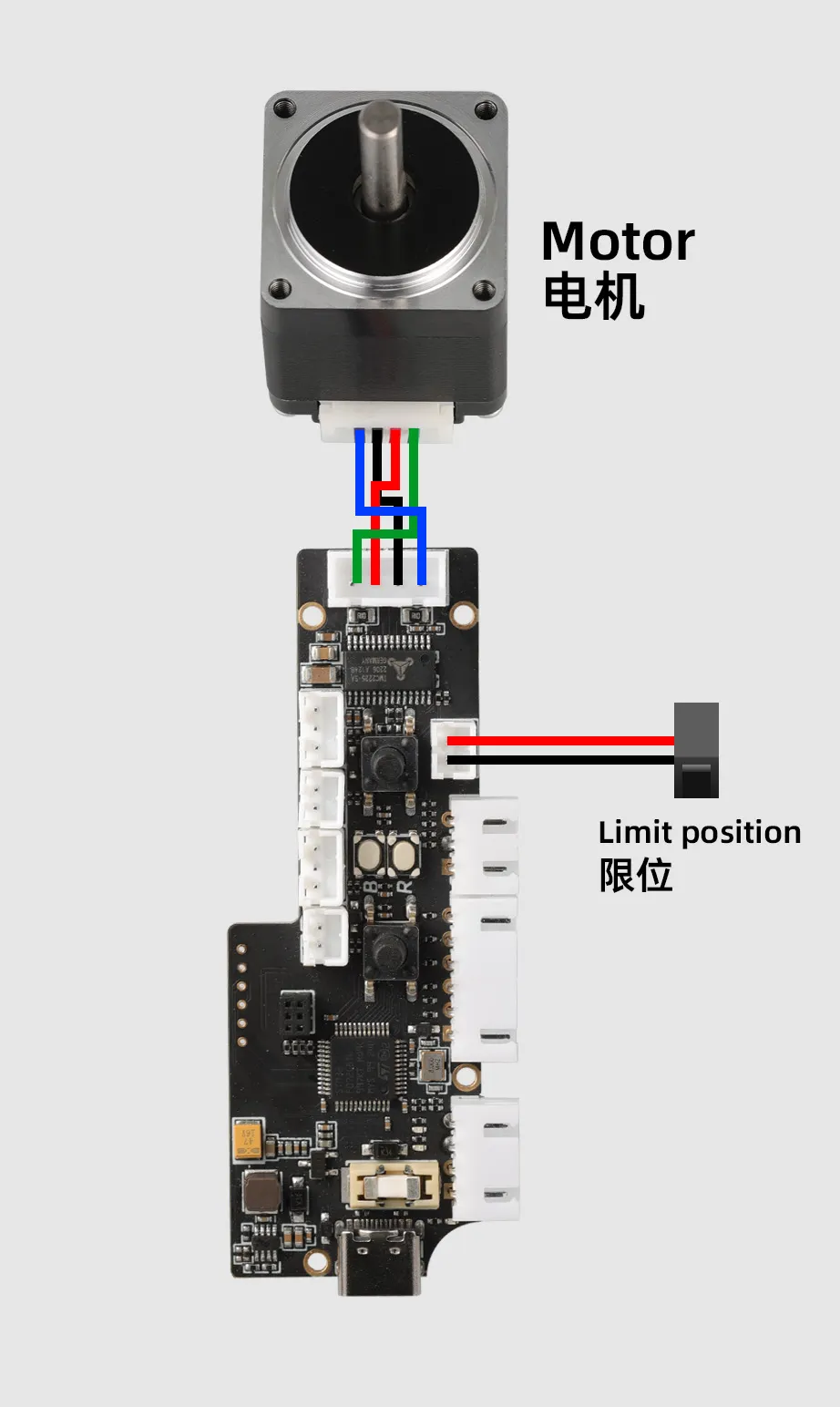
バッファー内部配線図
インストール動画
バッファーのメインボード接続および設定方法
重要な注意事項
- 以下の配線例に記載の
MMUツールボードはインターフェース定義の参考用です。実際の使用にあたっては、以下のようにしてください:
- ケーブルをKLIPPERメインボードのリミットスイッチ信号ポートに直接接続してください。
- 設定ファイル(例:
printer.cfg)内で、対応するポート番号を変更して設定し、機能が正常に動作するようにしてください。
- 基本機能
- バッファーのフィーディングまたはリトラクション機能の使用
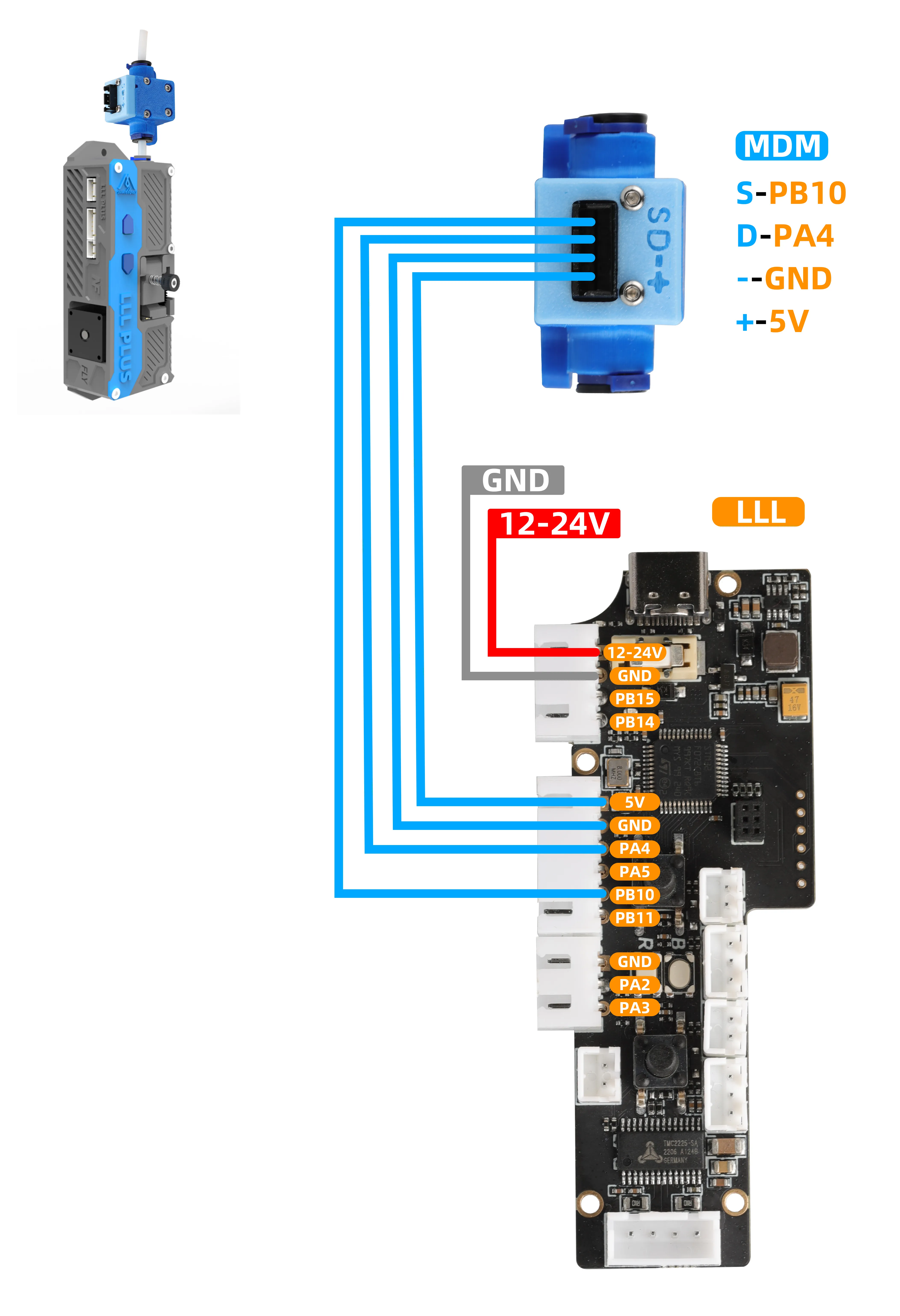
- MDMセンサーの配線と設定方法
-
このバッファーはフィラメント切れ検知および手動制御機能を内蔵しています:
-
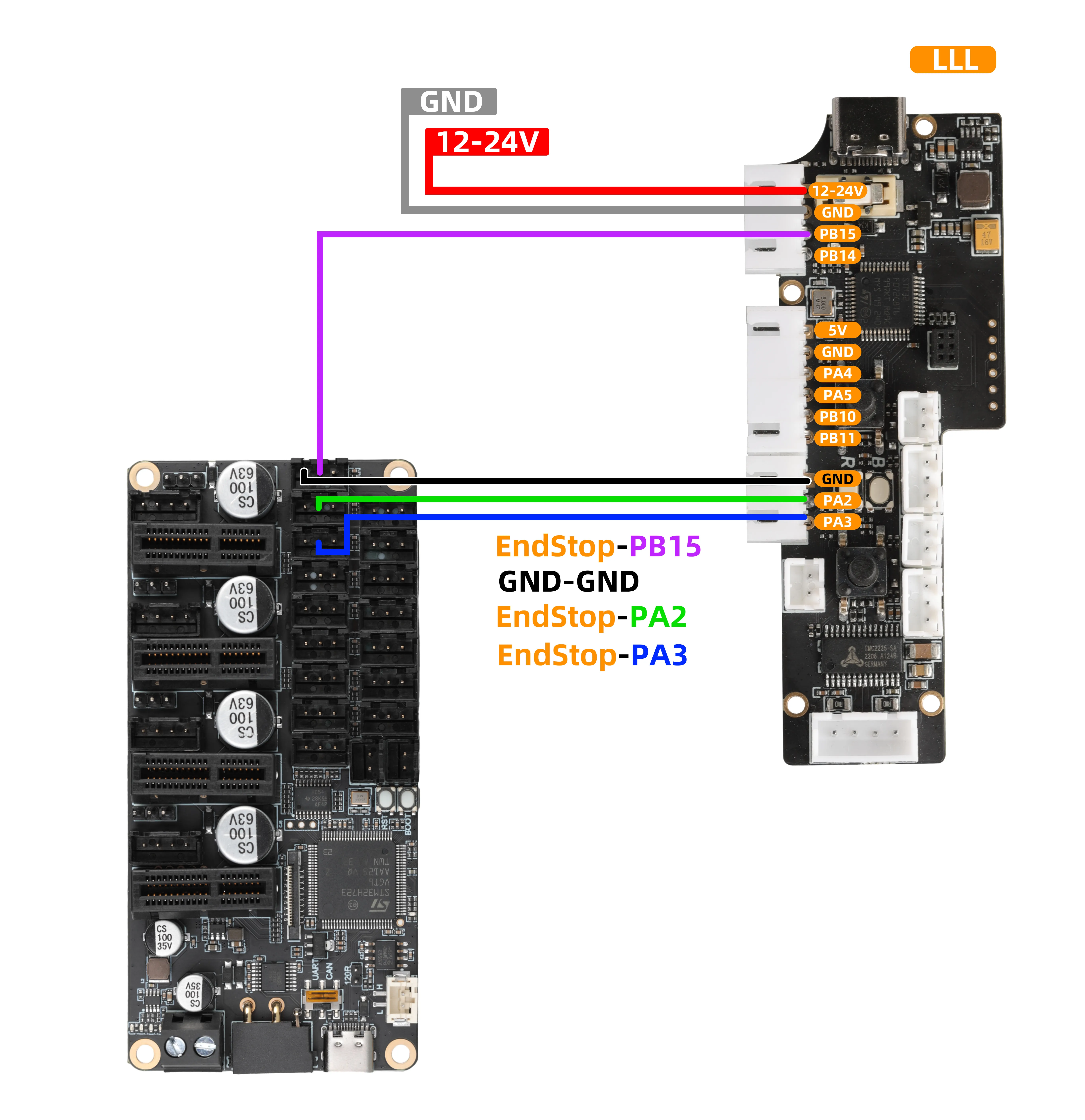
フィラメント切れ検出 (FILAMENT_SENSOR)
- 信号出力: フィラメント切れが発生したとき、バッファーの
PB15ピンからLowレベル信号が出力されます。
- 信号出力: フィラメント切れが発生したとき、バッファーの
-
フィーダーボタン (FEED)
- クリック: バッファーの
PA2ピンから3秒間のHighレベルパルス信号が出力されます。 - 長押し: バッファーが連続フィーディング動作を実行し、ボタンを離すまで継続します。
- クリック: バッファーの
-
リトラクトボタン (RETRACT)
- クリック: バッファーの
PA3ピンから3秒間のLowレベルパルス信号が出力されます。 - 長押し: バッファーが連続リトラクション動作を実行し、ボタンを離すまで継続します。
- クリック: バッファーの
配線ガイド
-
上記機能を使用する場合、以下のように配線してください:
重要な注意事項
- 図中の
MMUツールボードはインターフェース定義の参考用です。実際の使用にあたっては、以下のようにしてください:
- ケーブルをKLIPPERメインボードのリミットスイッチ信号ポートに直接接続してください。
- 設定ファイル(例:
printer.cfg)内で、PD3、PD4、PD5の対応するポート番号を変更して確認し、機能が正常に動作するようにしてください。
設定例
- メインボード設定例
[filament_switch_sensor Material_breakage_detection]
pause_on_runout: true
switch_pin: ^PD3 # 実際使用するピンに置き換えてください
runout_gcode:
PAUSE
RESPOND MSG="フィラメント切れを検出"
#SET_IDLE_TIMEOUT TIMEOUT=86400
insert_gcode:
RESPOND MSG="フィーディング開始"
event_delay: 2.0
pause_delay: 2.0
debounce_delay:2.0
[gcode_button フィーディング開始]
pin:^!PD4 # 実際使用するピンに置き換えてください、フィーダーに接続するピン
press_gcode:
RESPOND MSG="フィーディング開始"
# カスタムGコード
[gcode_button リトラクション開始]
pin:^!PD5 # 実際使用するピンに置き換えてください、リトラクターに接続するピン
press_gcode:
RESPOND MSG="リトラクション開始"
# カスタムGコード
-
ファームウェアを
V1.1.0にアップデートする必要があります。 -
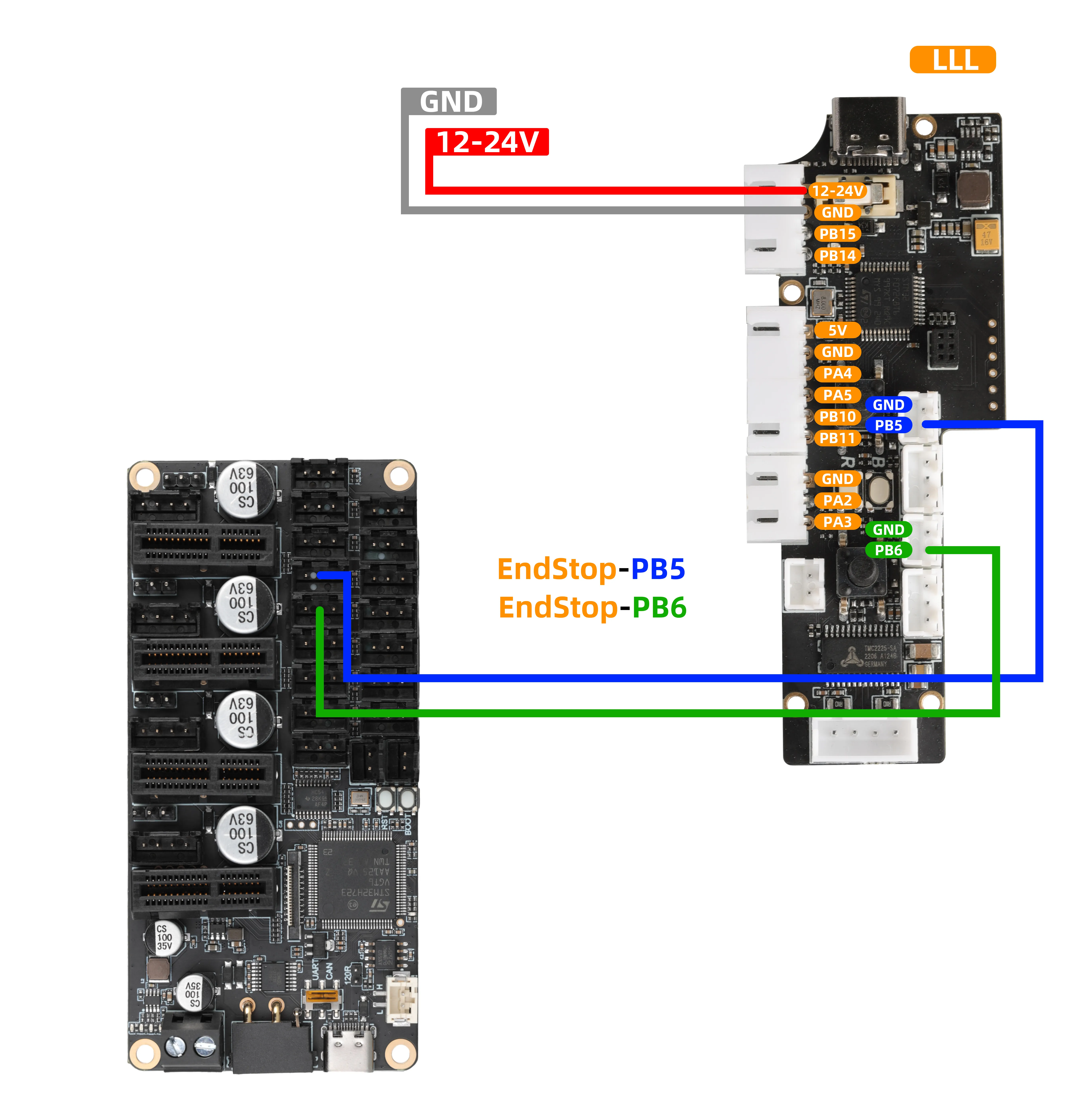
バッファーは以下のピンの電位状態を検出することで、自動連続フィーディングが可能です:
-
自動フィーディング: ピン
PB5がLowレベル信号を検出したとき、バッファーは連続フィーディングを行います。 -
自動リトラクション: ピン
PB6がLowレベル信号を検出したとき、バッファーは連続リトラクションを行います。
配線ガイド
- 上記機能を使用する場合、以下のように配線してください:
重要な注意事項
- 図中の
MMUツールボードはインターフェース定義の参考用です。実際の使用にあたっては、以下のようにしてください:
- ケーブルをKLIPPERメインボードのリミットスイッチ信号ポートに直接接続してください。
- 設定ファイル(例:
printer.cfg)内で、PB5とPB6の対応するポート番号を変更して確認し、機能が正常に動作するようにしてください。
設定例
- 設定の追加
- 基本機能を追加した後に以下の設定を追加してください
- メインボード設定例
[output_pin _フィーダーボタン]
pin:!PD6 # 実際使用するピンに置き換えてください
debounce_delay:2.0
value:0
[output_pin _リトラクターボタン]
pin:!PD7 # 実際使用するピンに置き換えてください
debounce_delay:2.0
value:0
[gcode_macro バッファーフィーディング] ## バッファーフィーディング
gcode:
SET_PIN PIN=_リトラクターボタン VALUE=0
SET_PIN PIN=_フィーダーボタン VALUE=1
G4 P10000 # 10秒
SET_PIN PIN=_フィーダーボタン VALUE=0
[gcode_macro バッファーリトラクション] ## バッファーフィーディング
gcode:
SET_PIN PIN=_フィーダーボタン VALUE=0
SET_PIN PIN=_リトラクターボタン VALUE=1
G4 P10000 # 10秒
SET_PIN PIN=_リトラクターボタン VALUE=0
機能概要
FLY-MDMフィラメント切れ/詰まりセンサーを使用することで、バッファーに詰まり検出機能を追加できます。- ファームウェアを
V1.1.0にアップデートする必要があります。
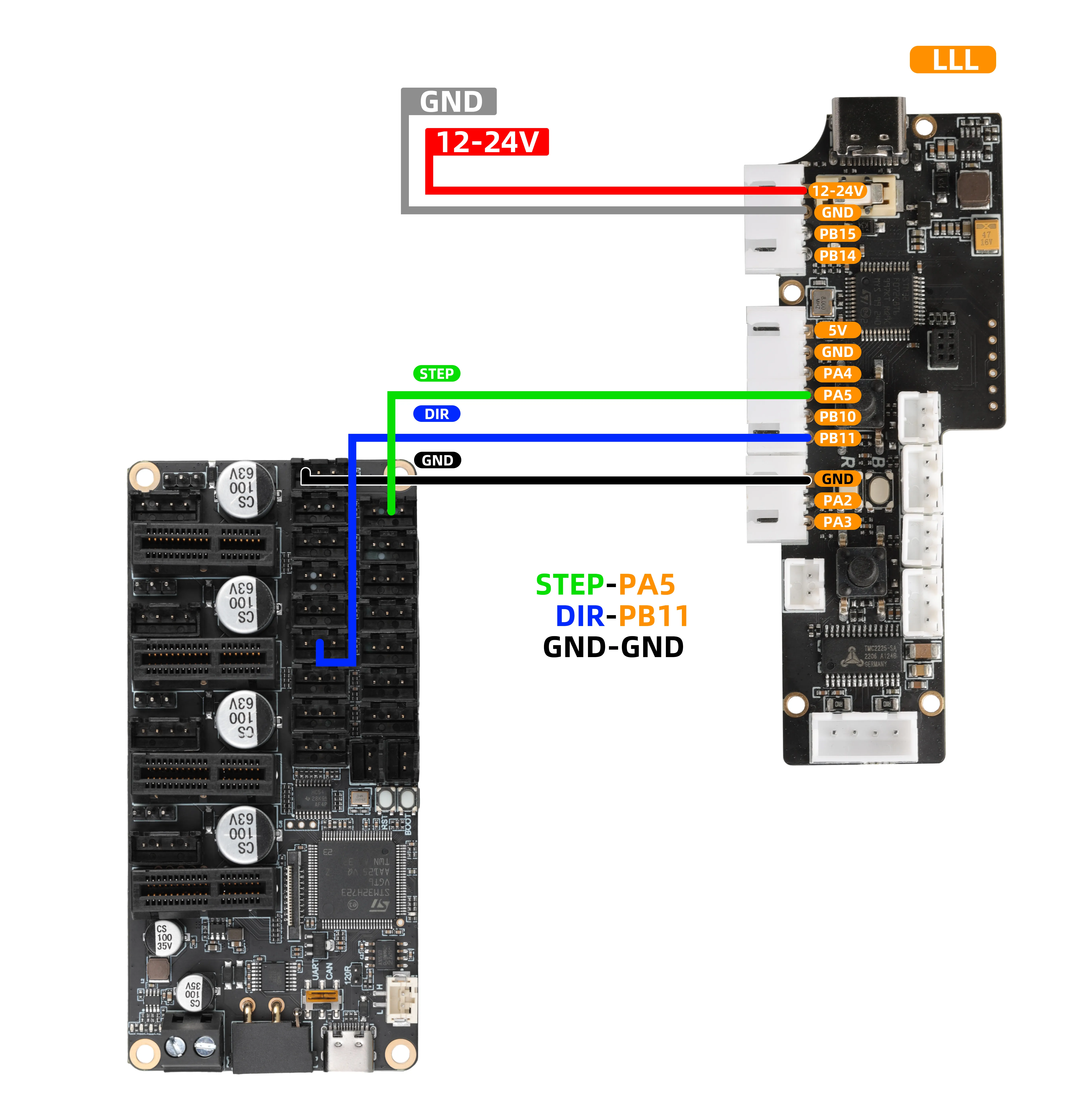
ハードウェア配線
- バッファーの信号線は、任意の未使用汎用デジタル出力ピンに接続する必要があります。例:
- バッファーの
STEPPA5をメインボードのPWM、RGB、12864のいずれかに接続してください。BL-Touchのサーボポートも使用可能です。 - バッファーの
DIRPB11をメインボードのリミットスイッチポートに接続してください。
-
この接続はエクストルーダーモーターの動作状態を監視するために使用され、詰まり検出機能の実現に不可欠です。
-
上記機能を使用する場合、以下のように配線してください:
重要な注意事項
- 図中の
MMUツールボードはインターフェース定義の参考用です。実際の使用にあたっては、以下のようにしてください:
- ケーブルをKLIPPERメインボードのリミットスイッチ信号ポートに直接接続してください。
- 設定ファイル(例:
printer.cfg)内で、PD3とPC0の対応するポート番号を変更して確認し、機能が正常に動作するようにしてください。
- MDM 推奨配線
設定例
- 設定の追加
- 基本機能を追加した後に以下の設定を追加してください。
- 以下の設定内の
STEPとDIRは接続したピン番号に修正してください。 - その他の設定もエクストルーダーの設定に合わせる必要があります。そうでないと詰まり検出が失敗する可能性があります。
- メインボード設定例
[extruder_stepper my_extra_stepper]
extruder = extruder
step_pin: PE10
dir_pin: PD4
rotation_distance: 17.472
gear_ratio:50:10
microsteps:16
full_steps_per_rotation: 200
バッファーパラメータ設定
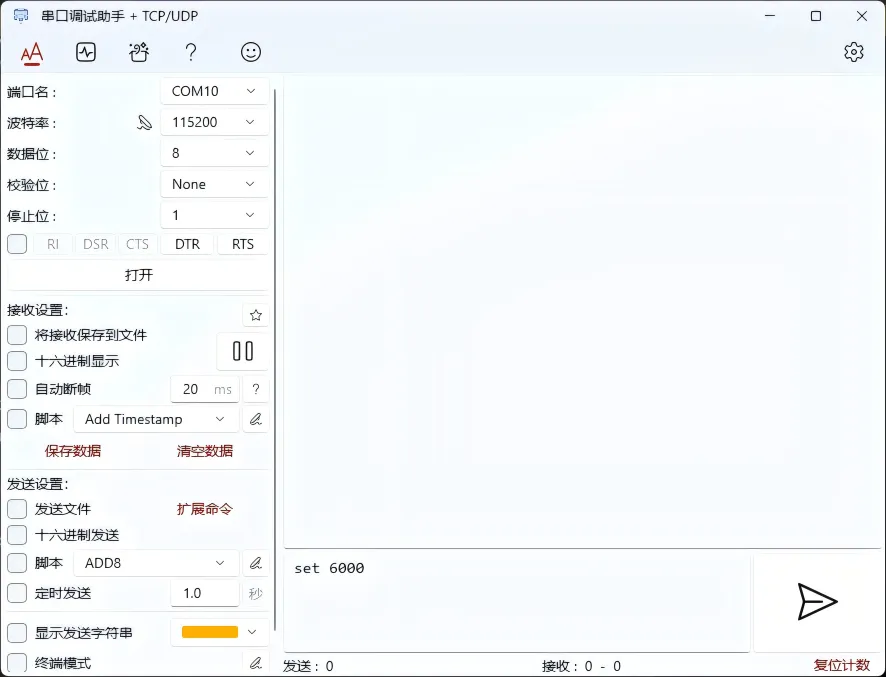
シリアルツールから取得- モジュールとコンピューターをUSBケーブルで接続し、シリアルツールを開き、対応するポート番号を選択し、ボーレートを115200に設定して「接続」をクリックしてください。
注意事項
- エクストルーダー設定に
gear_ratioが含まれていない場合は、駆動ギア数と被駆動ギア数を1に変更してください。
Loading...
パラメータ説明
| 機能説明 | 設定コマンド (シリアルツールで入力してください) | 初期値 | 単位 | 備考 |
|---|---|---|---|---|
| 現在の全パラメータを確認 | Loading... | - | - | 現在の全設定を読み取るためにコマンドを送信します。 |
| モーターステップ数を設定 | Loading... | 916 | - | モーターが1ミリメートル移動するために必要なステップ数を設定します。 |
| エンコーダー検出距離を設定 | Loading... | 1.73 | mm | 各エンコーダーサイナルが表すフィラメント移動距離を設定します。 |
| 動作タイムアウト時間を設定 | Loading... | 60000 | ms | トリガーがない状態での自動停止時間を設定し、連続吐出を防ぎます。 |
| 誤差スケーリング係数を設定 | Loading... | 2.0 | - | 許容誤差 = encoder値 X scale値。例: 1.73 * 2.0 = 3.46 mm |
| 速度制御コマンドを設定 | Loading... | 260 | mm | バッファの動作速度を設定します。最大600 (回/分)。ファームウェアはバージョンV1.1.1に更新する必要があります。 |
操作上の注意:
- コマンド形式: 上記表の「設定コマンド」列に記載されている整行のコマンド (例:
steps 916) が完全に入力する必要がある内容です。 - 送信方法: シリアルアシスタントの送信エリアにコマンドを入力した後、送信ボタンをクリックします。
- 自動保存: コマンド送信成功後、パラメータは即座に有効になり自動保存されます。追加の保存操作は必要ありません。
- 設定の確認: 任意のパラメータを変更した後は、
infoコマンドを送信して現在の全パラメータを照会し、設定が正しく反映されているかを確認してください。
Loading...